
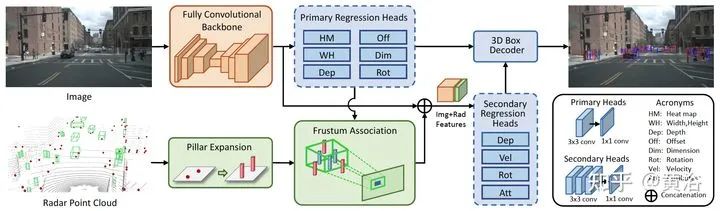
這是一個middle fusion方法�����,CenterFusion��,它先通過一個center point檢測法得到圖像的目標�,然后和雷達檢測結果做數(shù)據(jù)相關,采用的是一個frustum-based方法����。最后關聯(lián)的目標檢測產(chǎn)生基于雷達的特征圖補充圖像特征,這樣回歸目標的深度����、旋轉角和深度
作者 | 黃浴
鏈接 | https://zhuanlan.zhihu.com/p/345845006
以前提到過此文(在想法中),WACV‘2021錄?。骸癈enterFusion: Center-based Radar and Camera Fusion for 3D Object Detection“,作者來自田納西大學����。
作者提供了代碼:https://github.com/mrnabati/CenterFusion網(wǎng)絡架構如圖所示:跟摘要說的那樣,細節(jié)見下面模塊分析��。
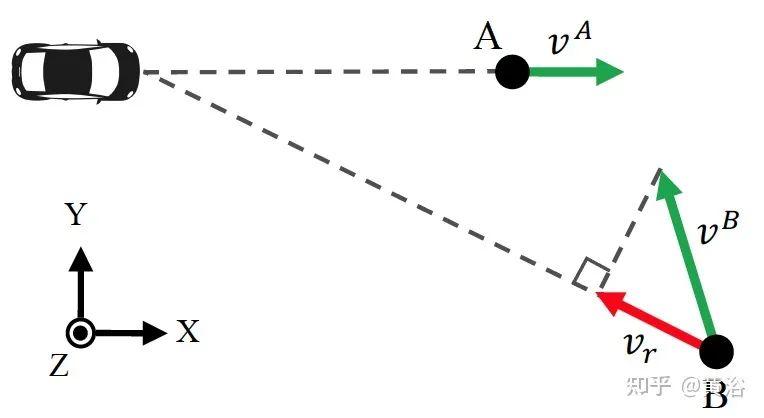
首先�����,需要搞清楚雷達信號檢測的是徑向深度和目標實際速度的不同�,如圖:
作者采用CenterNet方法,無錨單目的目標檢測方法����。其中keypoint的heatmap定義為:
 采用一個卷積encoder-decoder網(wǎng)絡預測Y?��;诖?,回歸3D目標的深度���、尺寸和朝向����。其訓練分類損失���,即focal loss:
采用一個卷積encoder-decoder網(wǎng)絡預測Y?��;诖?,回歸3D目標的深度���、尺寸和朝向����。其訓練分類損失���,即focal loss: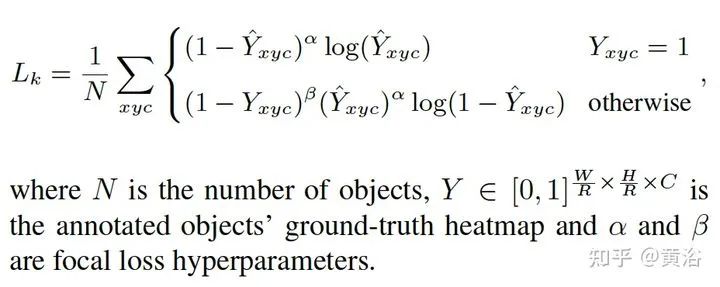 CenterFusion利用CenterNet先得到一個初步檢測��,然后修正的DLA(deep layer aggregation)網(wǎng)絡作為主干��,在primary regression head中預測初步的3D目標信息�,其中構成包括一個3X3的卷積層和一個1X1的卷積層���。Frustum association是關鍵融合雷達和圖像的機制�。用圖像2D框和其深度+大小的估計構建一個3D RoI frustum,如圖所示:
CenterFusion利用CenterNet先得到一個初步檢測��,然后修正的DLA(deep layer aggregation)網(wǎng)絡作為主干��,在primary regression head中預測初步的3D目標信息�,其中構成包括一個3X3的卷積層和一個1X1的卷積層���。Frustum association是關鍵融合雷達和圖像的機制�。用圖像2D框和其深度+大小的估計構建一個3D RoI frustum,如圖所示:

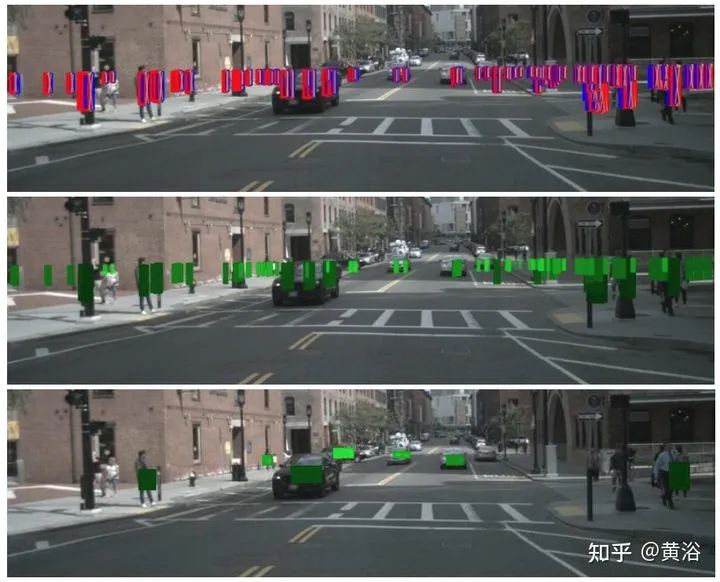
如果有多個雷達檢測點在這個RoI�����,直接取距離最近的一個�。注意這里提到一個scaling factor可增大frustum尺寸,以便包容深度估計的誤差����。另外,目標高度的不準確��,作者采用Pillar expansion對雷達點云做預處理�����。如圖所示:第一行是雷達點云擴大成3D pillar的顯示�����,第二行是直接把pillars和圖像匹配的結果�����,相關較弱�����。第三行是frustum相關����,減少了上面的深度值重疊,也防止背景目標(如大樓)錯分類成前景��。
圖像和雷達的數(shù)據(jù)相關之后�,可以提取雷達目標特征,深度和速度等�����。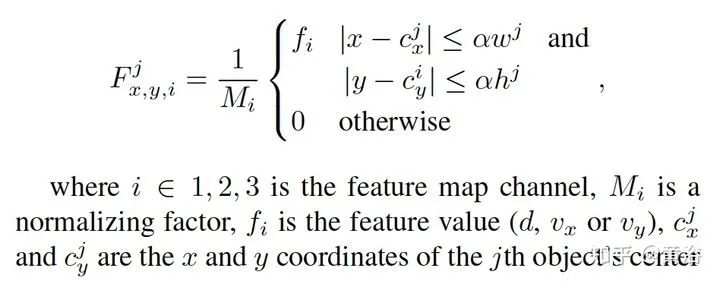
 如果兩個目標有重疊的heatmap區(qū)域�,按距離取最近的。之后���,這些特征進入secondary regression head�,其結構包括3個3X3卷積層和一個1X1卷積層����。最后結果需要經(jīng)過一個box decoder得到。訓練中regression head的損失采用SmoothL1 loss�,center point heatmap采用focal loss�����,而attributes regression head基于Binary Cross Entropy (BCE) loss��。
如果兩個目標有重疊的heatmap區(qū)域�,按距離取最近的。之后���,這些特征進入secondary regression head�,其結構包括3個3X3卷積層和一個1X1卷積層����。最后結果需要經(jīng)過一個box decoder得到。訓練中regression head的損失采用SmoothL1 loss�,center point heatmap采用focal loss�����,而attributes regression head基于Binary Cross Entropy (BCE) loss��。
直觀結果比較如下:1-2行CenterFusion��,3-4行CenterNet���。
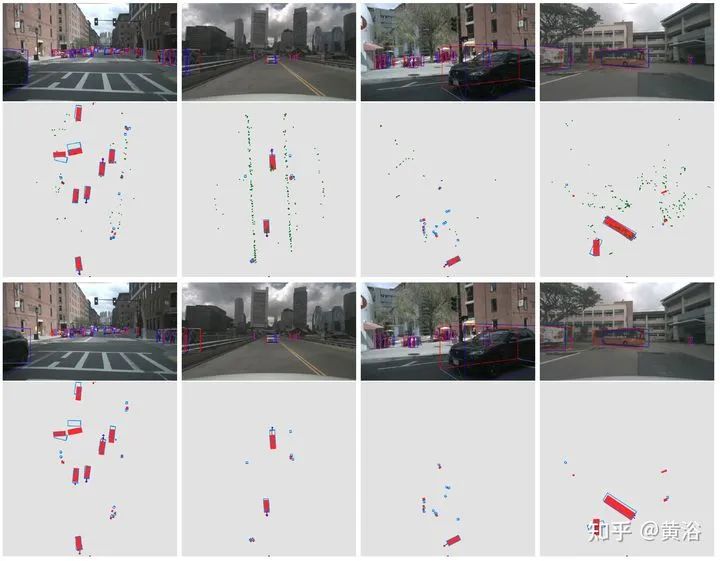
雷達點云綠色,目標框GT紅色��,目標預測速度藍色箭頭���。雙一流大學研究生團隊創(chuàng)建��,專注于目標檢測與深度學習�����,希望可以將分享變成一種習慣����!整理不易,點贊三連↓
 下載APP
下載APP